

Introduction
In the first semester of the Master program at ANU School of Cybernetics, we each had the opportunity to draw on our interests and creativity to make something with our hands by carrying out an individual maker project.
We were asked to make a prototype system and present on the journey for this first semester. The maker project certainly has helped me begin to explore ideas of relevance to the New Branch of Engineering (NBE) in a hands-on fashion and build technical skills that I never had the opportunity to engage with previously.
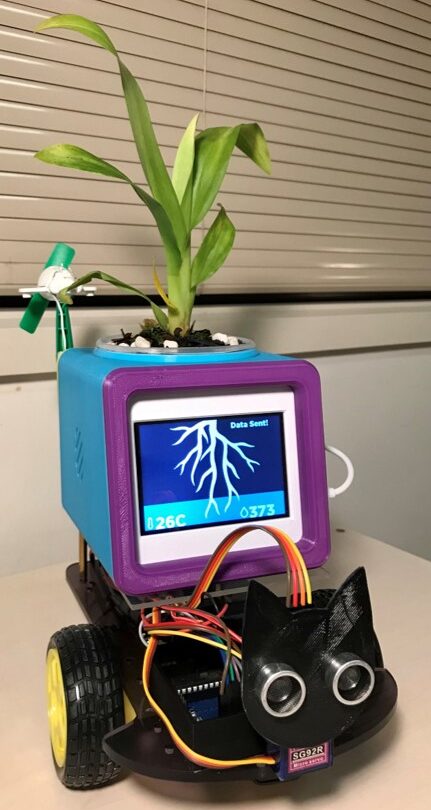
My motivation for this Maker Project is my mother, who loves orchids but struggling to keep them alive for more than a season because she either put too much water or not enough water. So I try to build her a pot plant for orchid with the humidity and temperature sensor that can alert us to water the plant when the humidity level is dropped below the threshold or the temperature is too hot and vice versa. Also she always wanted to have a pet, but she lives in an apartment block with no pet rule. So I want to make her a robot that can move around the house with a sensor to avoid any obstacles. I dedicated this Maker Project for my mum who has always been there for me and made this 3 in 1 self-sufficient robot pot for her which can move around the apartment just like her pet, and I call it the Cat RoPot (Cat Robot Pot) – still working on the right name for this prototype). The idea is the pot plant will sit on top of the robot and can move toward the sunlight in the future and powered with renewable energy from rechargeable battery using the solar panel attached and powered by the sun.
The Component & Process
The Cat RoPot is a 3 in 1 Cyber-Physical System that has three parts: the pot, the robot and the water pump. For more details of the electronic and circuits parts and the Python codes that I used for each system, please click on the picture or the word with the link below.


The presentation and demonstration about my Cat RoPot can be found on the video link below which will explain the following areas:
- Motivation for why I chose to make the Cat RoPot
- What tools / equipment / materials were used and why
- Why it is a convincing prototype
- What challenges I confronted along the journey
- How I overcame those challenges
- What new skills were learned
- What I would do differently next time
- What new ideas / thoughts / reflections draw on learnings relevant to the New Branch of Engineering
- What I learned through this process overall
- Who I helped or provided feedback to and who helped me during the course of the Maker project
Budgeting/Financial Planning
During this Maker Project, I also have to manage my budget within the budget allocated. The prototype build must be achievable within a budget of approximately $200 (not including supplies we already have access to in the School), and within 9 weeks. I think my experience in project management has helped me to manage the budget reasonably well. The highest cost for this project is the parts for the pot and the additional parts for the water pump. I used most of the tools/parts available in the 3Ai studio, especially for the robot parts, so I didn’t have to buy and spend more out of pocket. But if I count the shipping & delivery cost, I might slightly have gone over the budget. I also didn’t include the consumable items such as batteries because this cost is more ongoing or operational cost. The details for the expenses are listed in the below table.
| Item | Cost |
|---|---|
| USB Type A to Type C Cable – approx 1 meter / 3 ft long | $10.36 |
| STEMMA Cable – 150mm/6 Long 4 Pin JST-PH Cable–Female/Female | $1.68 |
| Adafruit PyPortal Titano | $125.52 |
| Adafruit STEMMA Soil Sensor – I2C Capacitive Moisture Sensor | $16.96 |
| Mini Oval Speaker – 8 Ohm 1 Watt | $5.50 |
| Self Watering System with Capacitive Soil Moisture Sensor + Relay Module + Water Pump + Vinyl Tubing | $19.01 |
| ESP8266 ESP-12E WiFi WLAN Wireless Module | $17.63 |
| Total Cost (excluding the shipping & handling cost) | $196.66 |
| Shipping & Handling | $24.71 |
| Total Cost (including the shipping & handling) | $221.37 |
The System Mapping
Based on my recent Task B – Questioning CPS analysis, I used system mapping to connect all the system networks. So I try to display this for the Demo Day using colourful cardboards and categories to show the relationship and interconnectedness between environment, technology and human as the centre of my AI-powered CPS design. This system mapping exercise has helped me to analyse my system thinking approach and see the relationship that one system has with another. I tested the connection between the user, the pot, the robot, and the water pump systems to draw the relationship.
Cybernetics concepts have certainly influenced my approach in designing this Cat RoPot. With some adjustments to each system, I bring multiple ideas and connect them as one new integrated system with the balanced ecosystem between environment, technology, and human, aligning with the New Branch of Engineering (NBE) ideas. Even though this Cat RoPot is not perfect and still has many improvements, it works well together for now.
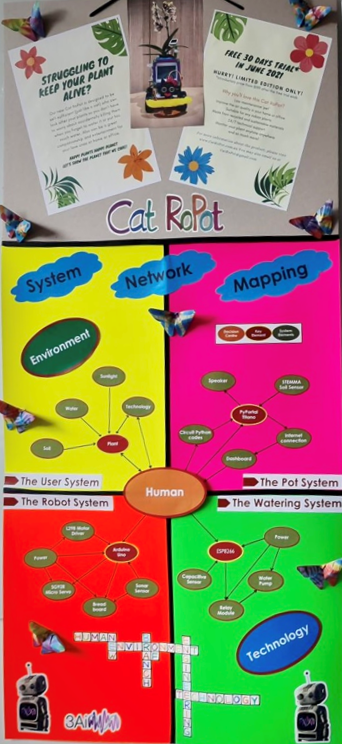
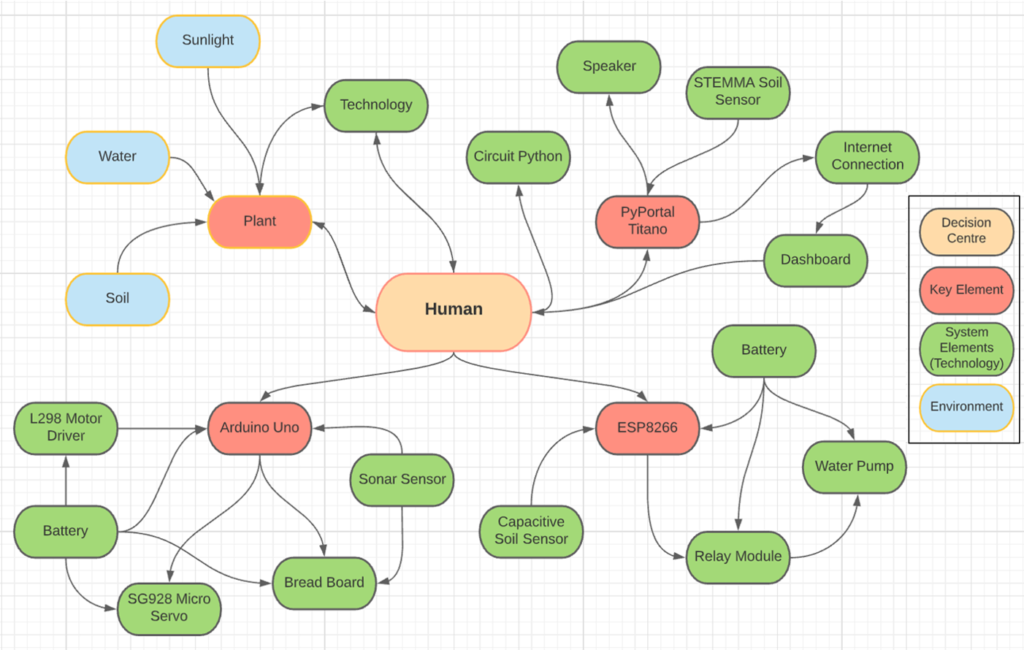
From the Demo Day display, I try to digitalise the complete system mapping by using a free program from Lucidchart.com that I found online.
The Marketing Poster


Reflection
My Maker Project ideas have been expanded since the initial design was presented to cohort, staff and external panel for the first time on 31st March when we had S1 Design Brief Presentation. The first design was only the pot plant which can measure the soil temperature and moisture level with the future idea to put the pot on top of a robot that can move around towards the sunlight. And then, on 11th May, we had S1 Maker Project Peer Review, where I presented the progress on my pot to include the robot that can move around the room using a sonar sensor to avoid any bumps or obstacles. I had to pivot the idea for the robot to move towards the sunlight and change it to move around by avoiding any obstacles because of the budget constraints that I have. The sonar sensor was available in the 3Ai studio, so I can use it without spending more money to buy the light sensor.
Fortnight 4 homework has provided me with a good foundational skill of how to connect and integrate sensors with other sensors and build circuits in electronic devices. I was able to transfer those learnings from the homework to my Maker Project, reinforcing my learning as well as building upon the new one to create a working prototype. Before the design brief my goal is to build the smart pot plant with the robot as my future vision. After the feedback from the panel member and understanding what I wanted to build and what was required to get there gave me a clear path and motivated me to achieve this vision of robot pot. During the mid-semester break I was so determined to build the robot part and it was so exciting for me. I really enjoyed the hands on activities and working with my hand to build something. During the Peer Review session, when I tested the robot, it moved too fast and made the pot plant almost fell over. So I had to modify the code to slow down. I also received some fantastic feedback from my cohort on this peer review, and I wanted to incorporate some of those ideas into my final prototype on the Demo Day, which was scheduled for 8th June. I chose to add the watering system because I thought this would make the pot more self-sufficient, just like a cat and hoping I could achieve this in a couple of weeks before the Demo Day. Leveraging both my learnings of circuits and coding in Python from my robot creature, I have the confidence and determination to add this 3rd element in my Cat RoPot.
I didn’t realise that by adding more elements into my prototype, I need to create a bigger robot car as the base to fit everything securely on the top. Given I already maxed out my budget, I need to learn how to design and make the robot car base bigger by using the acrylic from Plastic Creation in Fyshwick. The ANU Makers Space staff recommends this place because they have the off-cut piece, which is cheaper to buy for practice. Chloe, Sarah and I went there to buy the acrylic and the bigger battery pack from Jaycar because I have to upgrade the battery power from 6V initially to 9V then 12V due to the total weight of everything together. I should’ve used the TurtleBot, which is bigger and can carry the pot and the water pump, maybe for the next project.
Also, I learned the hard way that orchid is not an easy plant to look after. It’s a very delicate plant and requires high maintenance to keep it healthy. The winter weather in Canberra certainly hasn’t helped me to keep my orchid happy. The flower dropped, and the leave turned brown, almost died. I have to buy the spare orchids and other plants from Bunnings, so at least I can have something to display on the pot for the Demo Day.
How I plan to close the gap between where I am now and where I want to be? How would I gain more proficiency with those skills that I need to obtain for next semester? Basically, I have had some challenges almost at every part of this Maker project as this was my first time building a Cyber-Physical System prototype and coding each individual component. My first approach usually just give it a go, try and play with it and I have a positive problem-solving mindset when facing challenges. I was able to over come those challenges through my perseverance in experimenting with many trials and errors to see what worked. If I was to do this again, I would ask for more help from the Build teaching staff so I could spend more time on the Maker Project or other activities rather than spending time on the online tutorials as many of them didn’t work to solve my problems. I often collaborate with the other cohort and ask for help from the Build staff and seek information from other resources. I found that I learn better when I collaborate with other people rather than doing my own research. Because often, through discussion and brainstorming ideas, I learn more about myself that I didn’t know before, and I find this energises me.
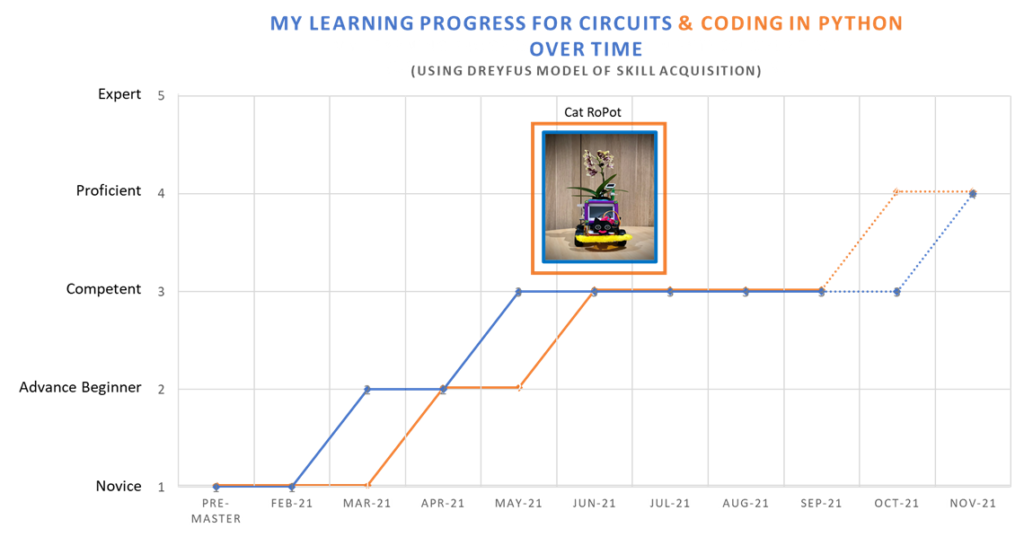
Overall, based on the Dreyfus Model of Skill Acquisition, After making this Cat RoPot, I believe I have progressed my skill in circuits and coding in Python to the next level through building my own Cyber-Physical System prototype that has many sensors, actuators, interface, wifi connection and portable power to form a 3 in 1 device. I feel confident in my skills and based on my experiments (failure and success that I have experienced through out the Maker Project). I believe that now I am sitting at an Advanced Beginner / Competent level from the Zero to Novice level at the beginning. I’m looking forward to continue developing my skills to become highly competent in both circuits and coding n Python and I hope that my proficiency will continue to improve over Semester 2 as I complete more Build fortnightly homework and build a Cyber Physical System for our CPS project group. My desired skill level will be Competent to Proficient and I’m planning to achieve this level by the end of this year through building more prototypes. Please see the chart below for an overview of my combined circuits and coding in Python learning progress.
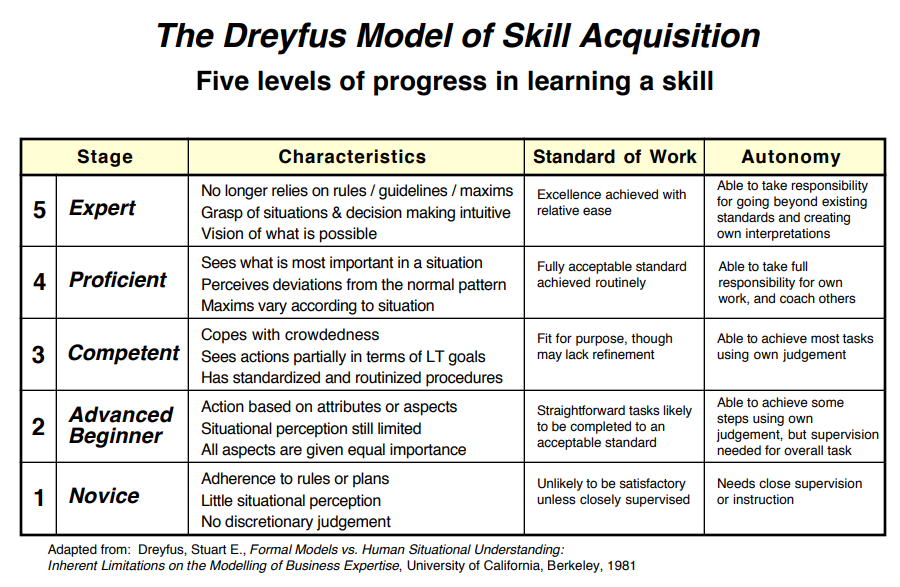
Dreyfus, S.E. (1982), “FORMAL MODELS VS. HUMAN SITUATIONAL UNDERSTANDING: INHERENT LIMITATIONS ON THE MODELING OF BUSINESS EXPERTISE”, Office Technology and People, Vol. 1 No. 2/3, pp. 133-165. https://doi.org/10.1108/eb022609
What’s next?
This Cat RoPot working prototype, dedicated for my mother is operational and further option can be explored to understand whether there is a wider market for this product in future (individual, commercial or agricultural use).
For future improvement, I would love to use more renewable, sustainable or maybe even recycle materials to build this Cat RoPot. As mentioned previously, I would like to add a light sensor that can follow the sunlight, also using the solar panel for the renewable energy to power the Cat RoPot. Perhaps these Cat RoPot can be scaled up for the domestic or agriculture sector and networked them together to help the farmers understand their crops better.
Acknowledgement
The 3Ai tutors & lecturer:
@Matthew for helping me to solve the pot and robot issues
@Johan for giving me the robot idea
@Mina for helping me with the watering system issues
@Zac for recommending me how to fix the speaker issue
@Paul for the feedback and encouragement
Core Electronic online forum: (Liam & James) for helping me with the PyPortal Titano issue
The ANU Maker Space team: Rachel, Saskia, Jordan and Sophia
2021 Cohort:
@Jake for the pot design idea and soldering guru
@Chloe for helping me with the Adobe Illustrator to design the car chassis with laser cutting machine.
@James & Julian as my bubble tea buddies
@Sarah for the great food recommendation – Melted in Fyshwick (Jaycar + Plastic Creation trip)
@Kate for me with some inspiration for the analytics method to use and scenario ideas
@Matt for being my Burgmann buddy
@Adrian & Erika for being my bouldering buddies
Overall very valuable feedback from the cohort
My family for their unconditional love and support ♥