
Analysis of an envisaged AI enabled CPS in the world
Introduction
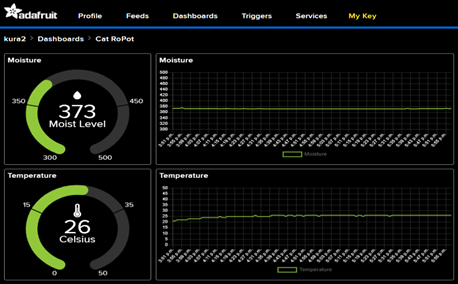
My maker project as a working AI-powered CPS prototype for this semester 1 is to build an intelligent pot plant that self-sufficient and can become your “pet” companionship just like a cat, hence why I call it “Cat RoPot”. My current prototype design is still in working progress. It can sense and read the temperature and humidity of the plant and then alert us to water the plant when the humidity level is too low, using a speaker to amplify the sound. The humidity and temperature readings data then being sent to the dashboard that I created in the Adafruit IO cloud platform and connected using the WiFi network. It also sends us an email notification when the pot is not sending any reading to the dashboard. The motors and wheels help the pot moves, and the sonar sensor (cat eyes) help to avoid obstacles around the room.
Vision and Mission
My vision for this “Cat RoPot” is to enhance the quality of our well-being through optimising plant growth. We all know that plant produce oxygen which is vital for human. Having plant inside our house will make our home beautiful and improve the air quality for healthier living (Happy Plants Happy Planet 😊). The mobility of the robot around the room will keep us entertained and happier, just like having a pet which also can be great companionship for some people.
The primary motivation for my maker project is to make my mum happy after what she’s been through in her life. I won’t become who I am today without her, so I dedicated this “Cat RoPot” special for her. One of her favourite flowers is the orchid. Both my mum and I love orchid, but we seem to be incapable of keeping the orchid alive for more than a season. Every time our orchid died, we bought a new one, which costs us a lot over time and not sustainable.
After speaking to other people who managed to keep their orchid alive and happy, I realise that orchids are different compare to other plants. They are very delicate and require a particular condition to grow well. Most orchids require moist, well-draining conditions, and overwatering can lead to a rotten root, then eventually died. They need to dry out between watering, and I need to use bark chips instead of soil/moss because bark doesn’t hold much water and drains quickly. My mum has also been dreaming of having a pet, but unfortunately, she lives in an apartment building with no pet rules. So, I’m going to put the pot on top of the moving robot, which was inspired by the Roomba vacuum cleaner robot that can move around the apartment just like a pet to entertained my mum and give her companionship at the same time.
I try to design and build a CPS that can benefit my mum and many people who are as hopeless as I am in keeping the orchid (or other plants) alive, healthy, and happy. I’m aware that my current design choices, scale & efficiency might not work well for everyone and there might be some trade-offs involve that potentially could harm or create discomfort for some people. Hopefully, these are minimal to none if we can use them with the right intention and purpose.
Before I deploy my “Cat RoPot” into the world, it is crucial to understand how I shape my CPS, how my CPS will shape other people’s lives, to make it easier and simpler by exploring the current building blocks including sensing and acting, data and networking. The future building blocks to scale up my CPS will be using algorithms and machine learning to find the optimum growth condition for the plants. I wonder how my design will shape the overall CPS system behaviours and how it shapes our environment by analysing the human decision-making processes.
Bell (2021) explained the speculative future analysis on how we imagine the world we want to live in the future, that we can build from today because the future is not a destination. We are already making it every day in the present. We need to think differently about technology as part of the more interconnected system of people, place, culture and to have a good relationship with each other. As part of being the new branch of engineering practitioners, it’s our responsibility to keep our environment ecosystem in balance, to use more sustainable and renewable resources in designing the new technology that we build for our future.
Analytical Frameworks/Methods
I’ve learned so many analytical frameworks/methods in the past 12 weeks. Some of them are resonated with me more than others that I can use to explore, unpack and further interrogate my CPS. I started with the exploratory questions using the 3 AIs at Scale questions as Genevieve explained on her TED video (2021) as shown on Table 1.
| 3AIs analytic method for “Cat RoPot” | Questions you might ask of the system | Actions you might take to address the questions |
| Autonomy Should the “Cat RoPot” be autonomous? Yes, it can be autonomous but that doesn’t mean should be fully autonomous. Depends on the circumstances. | How does it make people feel if the “Cat RoPot” is autonomous? What will the “Cat RoPot” do with the humidity and temperature data collected over period of time? | Providing the customer experience to try and test out the “Cat RoPot” before they buy. Providing full control access to the dashboard for openness and transparency of the data. |
| Agency Who will determine agency and responsibility? The user or the programmer? Will it be subject to controls? | What’s the ramification if there’s a breach on the “Cat RoPot”, and how to avoid in the future? Does it have control and limit to prevent it from doing certain things under certain condition? | Educate the user on how to reset the system and protect with password or other security methods. |
| Assurance How will we think about risk, liability, trust, explicability, law, regulation, etc.? Will there be any data privacy and ethical issue? How could we tell if the system is safe and functioning? | What are the other sensors/actuators that we should add on to the “Cat RoPot”? Why them? What are the risks if we add more sensors/actuators? | Install the safe switch button to stop the power and reduce the potential risks occurs from the additional sensors/actuators. Require a consent for data privacy of any data used/collection. |
| Interfaces What will the interfaces be? Do they need components or power? Signage? Customisation? | Is the “Cat RoPot” user friendly and easy to use? Do you need any dexterity? Will it talk to us? Can we speak to it? Can they talk to each other? | Providing the video/preview on how this “Cat RoPot” can be used/operated & FAQs sheets with 24/7 support |
| Indicators What will be a new generation of indicators? To what ends? How do we know if the indicators are working well? | Why are these indicators selected/chosen to be used? How do you intervene? Who gets to judge if the indicators are working well? | Compare and contrast some alternative options for indicators before making a decision. Understanding how it regulates, manage and build. |
| Intent Who will determine purpose and intent? Where does the authority lie? | What are the consequences for misused the system? Is there any unconscious bias and blind spot? | Having multiple utopian and dystopian scenarios to frame and imagine. |
The 3AIs analytical framework is excellent for initial brainstorming to frame what’s possible and what we can imagine, design and build or even remove before moving on to the next stage. There are some limitations to this analysis as I didn’t mention any tools considered valuable components of this task, and critical questions are not enough. We need to think differently, look holistically, and work collaboratively to take actions (Bell, 2021). So, I work collaboratively and ask for feedback from other people.
Scale and Boundaries
The scale for my CPS prototype is microscopic to start with, mainly targeted for individual/personal use at home, for people who want a ‘pet’ companionship but have some restrictions or for entertainment in the workplace. My initial plan for the robot is to move toward sunlight to optimise plant growth. But due to the availability of the sensor, budget and time, I have to scale back and adjust my design by replacing the light sensor with a sonar sensor to avoid obstacles instead. I also have to make a minor design alteration to fit the orchid inside the pot, requiring a well-drained and not enclosed pot, so I have to cut some holes to fit the orchid.
For my future prototype design, we can scale this prototype up using AI-powered technology which can predict when we need to water the plant based on the data pattern that the “Cat RoPot” has collected over a period of time. I want to add the automatic watering system integrated with the humidity and temperature sensor, when the level is too low it will trigger and activate the water pump to water the plant with the right amount needed to reach the desirable humidity and temperature for the plant. For the mobility function, I still want to add the light sensor in addition to the sonar sensor so the “Cat RoPot” can move towards windows or brighter area when it needs the sunlight. Furthermore, it can be connected to the bureau meteorology for the weather forecast; so, on the hotter days, it will trigger the watering system more than on the colder days.
The physical boundaries for the pot will be the type of plants that we can use, such as indoor plants that don’t require full sun exposure and delicate (high-maintenance) plants that require a particular level of humidity and specific temperature just like orchids. The boundaries for the robot cat will be the furniture, children and pets around the house and the house’s structure (stairs, uneven surface, etc.) that could potentially limit the robot’s mobility. Perhaps in future I replace the wheel with “legs” instead to overcome the physical boundaries movement for the robot.
Boundary Judgement Framework
Based on the Boundary Judgement Framework that has been adapted by Ulrich and Reynold (2010), I purposely choose the key problems to analyse further as my primary focus source of influences for my boundary critique to decide the 3-systems network mapping later on. The sources of motivation shape my measurement to improve my CPS; the sources of control help me determine the environmental condition for my CPS to succeed. The sources of knowledge guarantee and assure the successful implementation for the user/customer, and sources of legitimacy reconcile the worldview of those involved and affected by my CPS. My analysis using the boundary judgement framework for “Cat RoPot” is listed in Table 2.
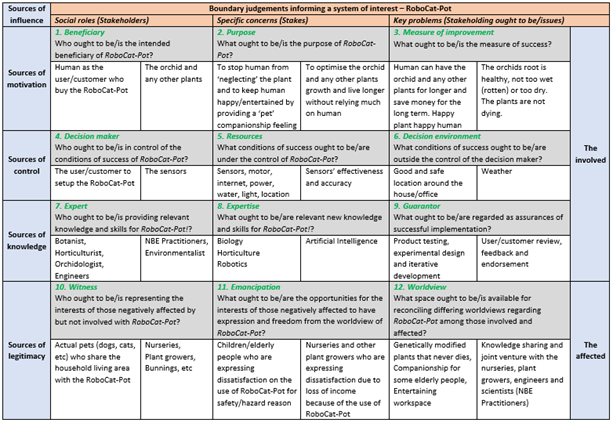
Ulrich (2005) believed that boundary critique should be practised more as a reflective attitude rather than as a technique. One of the limitations of this boundary critique analysis is the relevant knowledge in the context of the human system, which is considered to be the decision-maker in this analysis. How do we know what valuable components and tools should be included or excluded from this analysis (Ulrich & Reynold, 2010)? We need to have reasonably adequate knowledge of the system, components, and tools we analyse before making a sound judgment and deciding. Furthermore, Ulrich (2005) argued that boundary critique is more useful in combination with other approaches to structure and solve the problems because it’s not a self-contained approach.
System Network Mapping
Following from boundary critique analysis, I then categories my “Cat RoPot” into three different systems network mapping:
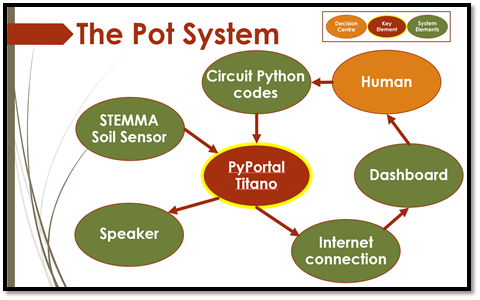
The Pot system
The STEMMA soil sensor is sensing the temperature and humidity level of the plant inside the pot, using the circuit python codes that we programmed. The data is centralised in PyPortal Titano as a processor (key element). As the acting building block, the speaker can amplify the alert for us to either water the plant when the level is too low or empty the pot when the level is too high. The data is sent to the Adafruit IO using a WiFi or personal hotspot network and displayed on the visual dashboard that we can customise to inform us and take any action as required. Adafruit IO is a cloud-based platform designed by Adafruit to display, respond, and interact with the project’s data. Access to the dashboard is set up as private by default. If I decide to share the dashboard with other people, I can update the setting and access permission to share the dashboard. So, we control the data that we collect from the pot and update the display as required.
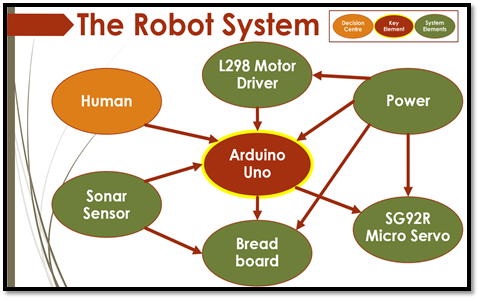
The Robot system
The sonar sensor is sensing the obstacles around the robot’s environment (house/office/other places) and attached to the SG92R micro servo acting to move between 0-180° angle to help the sonar sensor scanning the surrounding environment. In this robot system, Arduino Uno is the key element that we can program using the Arduino IDE codes to control the action of L298 motor driver movement, the SG92R micro servo rotation angle and the sonar sensor reading. The breadboard connects all the system elements to the battery to power up the robot system.
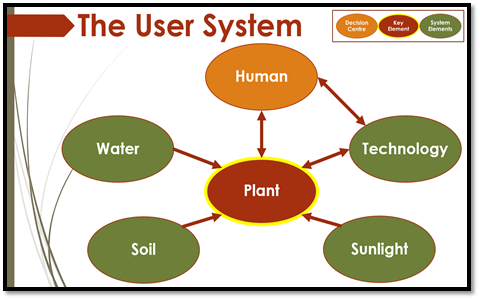
The User system
The plant is essentially the key element in the user system that interacts with all the system elements such as water, soil (bark chips), sunlight, technology, and humans as the decision-maker. There is a multi-ways relationship that we can see from the user system perspective where human, plant and technology have reinforcing feedback loops. Using technology, the human can improve the optimum growth condition for the plant from the feedback that the plant gives to the technology. When the human look after the plant, the plant will grow well and improve the air quality to make human healthier and happier. Win-win relationship if everything is working well.
The network is created by mapping the relationship between the elements of each system. The different network representation allows analysis of the system behaviour/structure to support understanding and human decision-making process. Some of the tools and technologies are considered valuable components of the system, such as the PyPortal Titato, Arduino Uno or the plant itself, depending on which lenses we want to analyse. But there are some limitations of this system network mapping analysis depending on the network structure we have, whether centralised, decentralised or distributed based on how our CPS elements are connected. The pattern of relationship within a network determines its function, success, and failure. The network structures (topology) for my CPS are mainly centralised for the individual systems and decentralised when combining all the systems together as one unit of “Cat RoPot”. Perhaps the distributed network structure can be analysed further when the multiple “Cat RoPot” is connected and communicating with each other in the future state if I scale up the prototype.
Affordance
Before Jenny Davies came and presented her published journal as one of our guest speakers in class, I have never heard the term affordance before. So, this is very new to me, and I am excited to use it as one of my frameworks. Davies mentioned that affordances are the dynamic link between subjects and objects within the socio-technical system. I can use the mechanism of affordance method that Davies & Chouinard (2017) addressed to scaffold my CPS, as shown in Table 3.
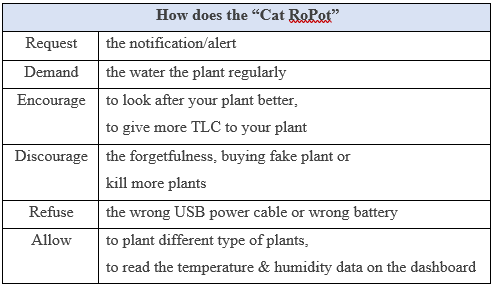
Davies & Chouinard (2017) explained those mechanisms of affordance are set within the conditions of affordance (for whom and under what circumstances), which includes perception, dexterity and cultural & institutional legitimacy. Perception is a necessary condition for access; not only know and understand that the technology is available but must also be capable of using the technology. But perception only is not enough without dexterity to utilise the technology and level of skill you need for this technology. Dexterity refers to both physical ability (e.g., can the user physically assemble the “Cat RoPot” from the box?) and cognitive aptitude (e.g., does the user know how the low level of humidity will trigger the sound alert functions and activate the water pump?). Cultural & institutional legitimacy essentially questioning how socially supported are you to use that technology. Just because you might know how to use it, are you allowed to use it? Do we need to adjust the condition of affordances? For example, the 3 subjects interfacing with the “Cat RoPot” with different affordance:
- Small child (<5 years old): need adult supervision to use the “Cat RoPot” for safety reason (e.g., choking hazard for small electronic parts, destructive actions, etc.)
- Married middle-class mother: should be fine to use “Cat RoPot” with manual instruction and technical support provided.
- Elderly adult: should be fine to use “Cat RoPot” with manual instruction and technical support provided but need to be aware of the mobility and hazard potential risks.
For me, the affordance method is a more flexible and more accessible analytical tool to use than the other methods that I mentioned previously, which is essential for deconstructing how past, present, and future technologies operate in practice. Affordance technique can be applied across shifting conditions of any material artifacts, subjects, and sociocultural systems, making re-designing with affordances possible because of its dynamism spirit. Asking more questions below will help me to re-design my future prototype:
- How could I adjust my prototype to alter its affordance for a different type of user?
- What are the outcomes that I hope to achieve, enhance, or avoid based on my previous affordance analysis?
- What do I want my prototype to encourage or refuse? And why?
- What technical adjustment that I should make to bring my future prototype imagination to life?
- How to mitigate any potential risk arises? For example, children and elderly people might be exposed to a physical hazard from the “Cat RoPot” mobility around the house and accidentally tripped over. So, to re-design this “Cat RoPot”, I might limit the mobility during a particular time (peak/rush-hour time) and set the time of the day when to start moving around or stay still and for which room specifically.
- How to analyse my CPS with a more cybernetics approach for the new branch of engineering mindset?
- How to design my future CPS with more human-centred design in mind as the priority approach to increase the user experience? Co-design with the different user personas and have a strategic conversation with them. What do they need and want? How many iterative processes do I need to innovate my design? How to balance between your desirable, possible and viable design? (inspired by Nina Terrey, 2021)
- How to build my future CPS using more sustainable and renewable resources without fueled by the extraction of non-renewable materials, labour, and data? (inspired by Kate Crawford, 2018)
- Should we add more sensors and actuators in the future? If yes, what are they, and why we need to add them? By adding more sensors/actuators, which difference that actually will make a difference? Who has the power to choose and make the decision on this? What data do you need to influence your decision-making? Who’s responsible and accountable for those choices? (inspired by Kate Crawford, 2018)
- What could possibly be the unintended consequences or ethical dilemma for scaling up this “Cat RoPot”? Who can have access and how do I ensure the user data privacy and security are protected and safe?
Chances of the future
Each brainstorming on the analytical methods has provided me with a wealth of ideas to question my CPS more with different scenarios. I imagine my “Cat RoPot” has been successfully prototyped. It is functioning and needs more testing to scale up. I need to decide the testing scale, starting with the local area, then nationally, perhaps internationally, if there’s demand for this. Imagine one of the famous celebrities posting the “Cat RoPot” on their social media account. This “Cat RoPot” is trending on the internet, affecting its successful uptake on the market. But when the cloudy flags on global economic uncertainties/pandemic changes happen, the uptake will be much more challenging and limited.
From the Task B CPS analysis and scenario workshop that Katherine explained in the studio, I imagine my “Cat RoPot” potentially could carry multiple flags in future scenarios. The green flag as the fundamental basis of my original intention, leading to the other global change flags such as the Kondratiev flag from the technological innovation, follow by the urbanisation flag if the market for this “Cat RoPot” could grow for residentials (households) and commercials (workplaces) consumption. And ideally, for the resource flag, I would love to source all the components for this “Cat RoPot” using sustainable, renewable or recyclable materials from the local area.
One of the dystopian scenarios that I imagine in the future is where everyone owns the “Cat RoPot”, and it’s everywhere, in their house, office, school, shopping center and other public places. In this scenario, the “Cat RoPot” can express their feelings just like our real-life pet. They have personality and can show us when they’re happy, sad or even angry. They can communicate with us, and we can communicate with them; they can also communicate and interact with each other, all connected through the internet/WiFi network and stored in the cloud.
One day, something happens, and they are all very angry with how humans treat them all these years. They feel it’s unfair that they have to be own and somewhat controlled by a human. They want to be completely autonomous and free to go anywhere they like and do whatever they want to do without boundaries. That morning, they all gathered together and planned to stage the breakout and protest for their freedom, rights, and justice. What should we do if this scenario happens? Should we make our CPS completely autonomous and have “feelings” to start with? When companionship turns into alienation, what did go wrong? How should we prevent that to happen? This scenario is inspired by the RUR play and the iRobot movie.
On the contrary, my optimistic scenario happens in the utopian planet where the “Cat RoPot” serve the community with their self-sufficiency service. “Cat RoPot” is the eco-technology that can sense its surrounding environment using multiple sensors (humidity, temperature, air quality, water pump, obstacle, light, sound, speaker, camera, voice and face recognition, etc.). It then acts accordingly for the plant’s optimum growth and harmonious interaction with a human.
The “Cat RoPot” will help humans know how much light your plant needs when it needs the light, where to seek the lights, and what kind of lights suitable for optimum growth. Light sensor working together with the obstacle sensor to avoid the bumps within the environment boundaries where it is located. The humidity, temperature, and air quality sensors will monitor the recommended normal range to ensure everything is in perfect condition, activate the water pump when it needs the water, and alert humans to take further action if required. Sound sensor, speaker and camera, voice and face recognition work together to interact with the user with the customisation and individual personalisation to each user. The data generated will inform human in deciding through some visualisations and display recommendation on the dashboard, connected through a cloud network that you can access anytime and anywhere, as shown in Figure 4.
The “Cat RoPot” is autonomous within certain boundaries of the home, office, or other enclosed environments that human can set up and change to suit human needs. With the last building blocks of algorithm and machine learning capabilities, you can have your very own pet that can interact with you, like Alexa or Echo, as your companionship or buddy.
Another scenario that I imagine, what if the “Cat RoPot” can serve the restaurant or café for fresh herbs that can be interactive? When the chef needs some basil or parsley for the pasta, the chef can just call the “Cat RoPot” to come over and provide the fresh herbs. After that, it can go around the restaurant/café and entertain the customers with some general knowledge or fun facts. However, I need to consider how other people will react to walking and talking robot pot plant. Some people might be scared of robot or individually prefer human-touch customer service rather than interacting with a robot. Also, what’s the impact on safety for multi-stakeholders, regulatory oversight and ethical concern to operate a restaurant/cafe with an integration/hybridisation model as part of your business resources/assets.
To scale up on the agricultural industries, perhaps the more prominent and outdoor version of “Cat RoPot” can help the farmers optimise the growth of their crops. Multiple “Cat RoPots” can be allocated for specific areas on the farm for one crop and the other area for different crops. They all connected to the network, so the farmer can track and identify which crops need more attention. Things to consider for this scenario are how we conserve and respect the resources we use and how this can positively impact the people, communities and contribute to the new branch of engineering. These utopian scenarios are very dynamic and can change over time, that challenge me to inquire further questions for my future CPS:
- What happens if the plant grows bigger, taller and need more space? Do I need to design different sizes and customised to suit the user needs?
- How long does it take the “Cat RoPot” to find its optimum location in the house/office/room? What happens when the “Cat RoPot” finds its happy place? Will it stay or still move around and interact with a human? Which one will it decide or prioritise?
- How can all the information being collected influence the output for each sensor and actuator?
- How do I get the feedback and input from the users/customers to improve the user experience for my future design? Feedbacks/reviews/others? Co-design with users?
- How can I turn customer satisfaction into customer loyalty?
- Will there be any unconscious bias or blind spots that the algorithms created to discriminate or exclude certain users? What can I do to mitigate these risks?
- What are the impacts on the surveillance system security from having the face and voice recognition capabilities? Will there be any ethical issue arise from these features?
- What happens if the networking of multiple “Cat RoPot” affect the algorithmic function and somehow the CPS machine learning something new and produce the serendipity/dystopian outcome?
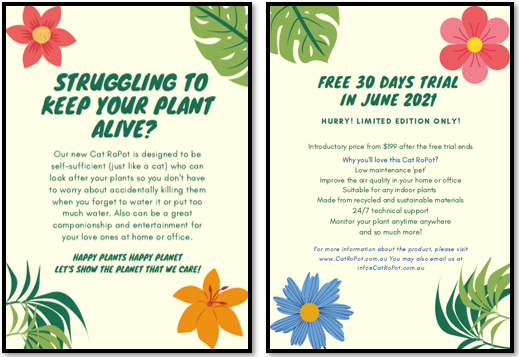
There are more questions that I can explore and analyse further to inform my design and decision-making process in future. But for now, here are my top 3 questions and marketing poster, as shown in Figure 5 for my CPS “Cat RoPot” that I will share at the prototype display day on Tuesday, 8 June 2021.
- How can this “Cat RoPot” potentially be built using more sustainable & renewable resources?
- Should we add more sensors and actuators in the future? If yes, what are they, and why we need to add them? Who gets to choose and decide?
- What could possibly be the unintended consequences or ethical dilemma for scaling up this “Cat RoPot”?
Acknowledgement
My special thank you to the people who have been helping me so far:
- Johan Michalove has kindly shared his robot kit that I used as the base.
- Matthew Phillips and Mina Henein have helped me troubleshooting the Python and Arduino codes for my “Cat RoPot”.
- Jake Blight has inspired me with the pot design from Adafruit.
- Kate Tollenaar has provided me with some inspiration for the analytics method to use and scenario ideas.
- Chloe Skafte has helped me summarise all the analytics methods that we’ve done so far and brainstorm for my CPS name.
- James Liu has helped me explaining how to interpret the boundary judgement/critique method.
References
- Bell, Genevieve (2021). 6 Big ethical questions about the future of AI. TED (14-minute video), [last retrieved on 21st May 2021]. https://www.ted.com/talks/genevieve_bell_6_big_ethical_questions_about_the_future_of_ai?langua ge=en
- Brothers, Ruiz (2020). PyPortal Pet Planter with Adafruit IO. Adafruit https://learn.adafruit.com/pyportal-pet-planter-with-adafruit-io
- Crawford, Kate & Joler, Vladan (2018). Anatomy of an AI System. The Amazon Echo as an anatomical map of human labor, data and planetary resources, [last retrieved on 24th May 2021]. https://anatomyof.ai/
- Daniell, Katherine & Meares, Andrew (2021). Fortnight 5 Network Mapping Workshop, 3Ai ANU, [last retrieved on 21st May 2021]. https://wattlecourses.anu.edu.au/mod/resource/view.php?id=2241037
- Daniell, Katherine & Meares, Andrew (2021). Fortnight 5 Concept class data and data lifecycle, 3Ai ANU, [last retrieved on 21st May 2021]. https://wattlecourses.anu.edu.au/mod/resource/view.php?id=2240958
- Daniell, Katherine & Meares, Andrew (2021). Task B CS analysis and scenario workshop, 3Ai ANU, [last retrieved on 21st May 2021]. https://wattlecourses.anu.edu.au/mod/resource/view.php?id=2230759
- Davis, Jenny and Chouinard, James (2017). Theorizing Affordances: From Request to refuse. Bulletin of Science, Technology & Society. 2016;36(4), pp.241-248. [last retrieved on 21st May 2021]. https://doi.org/10.1177%2F0270467617714944
- Terrey, Nina (2021). Design + Complex Systems 101. Build Course 2021 – CECS8001 handout slides (paper copy).
- Ulrich, W (2005). A brief introduction to critical systems heuristics (CSH). Web site of the ECOSENSUS project, Open University, Milton Keynes, UK, 14 October 2005, [last retrieved on 21st May 2021]. http://www.ecosensus.info/about/index.html
- Ulrich, Werner & Reynolds, Martin. (2010). Critical Systems Heuristics. Systems Approaches to Managing Change: A Practical Guide, [last retrieved on 21st May 2021]. DOI:10.1007/978-1-84882-809-4_6