
The Component/Parts
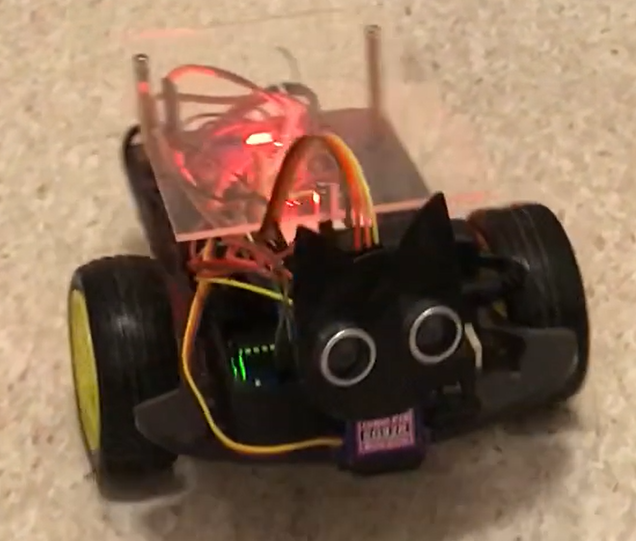
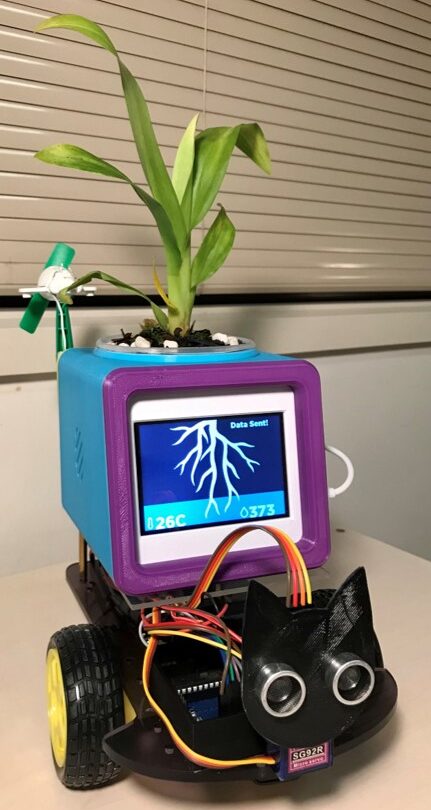
The second part is the robot. Because I already max out my budget, I try to reuse any available materials in the studio. Luckily Johan had an old robot kit sitting in his office for a while, and he’s kindly letting me use this robot for my pot. But you can also buy this from Jaycar. The only thing that I buy is the 9V battery, and I also use a 3D printer to make the Arduino Uno case and the sonar sensor holder, which shape like a cat head. The 3D printer file can be found on the link attached on the description. Below are the tools and parts that I use to make this robot car:


The Process
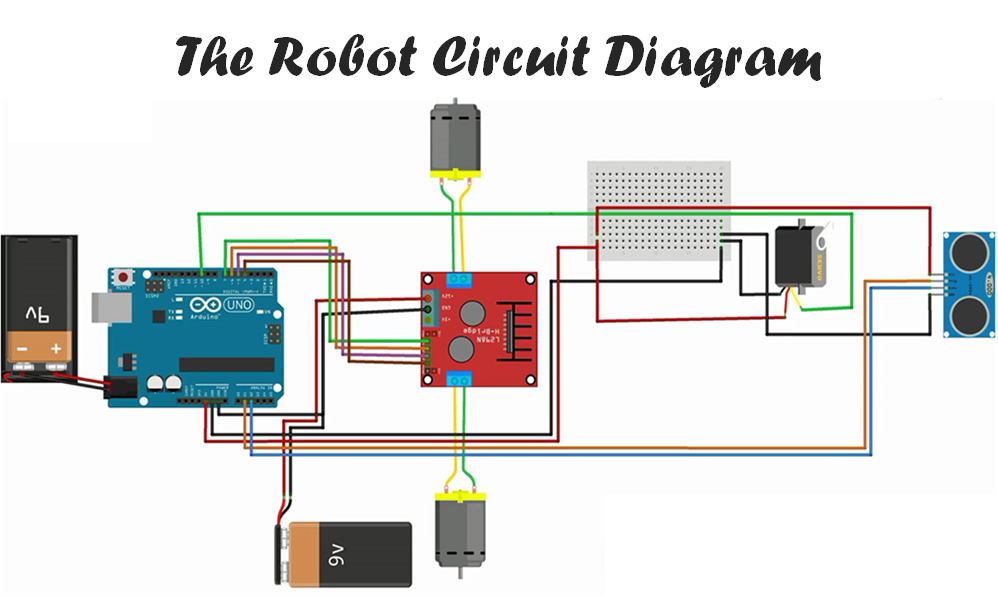
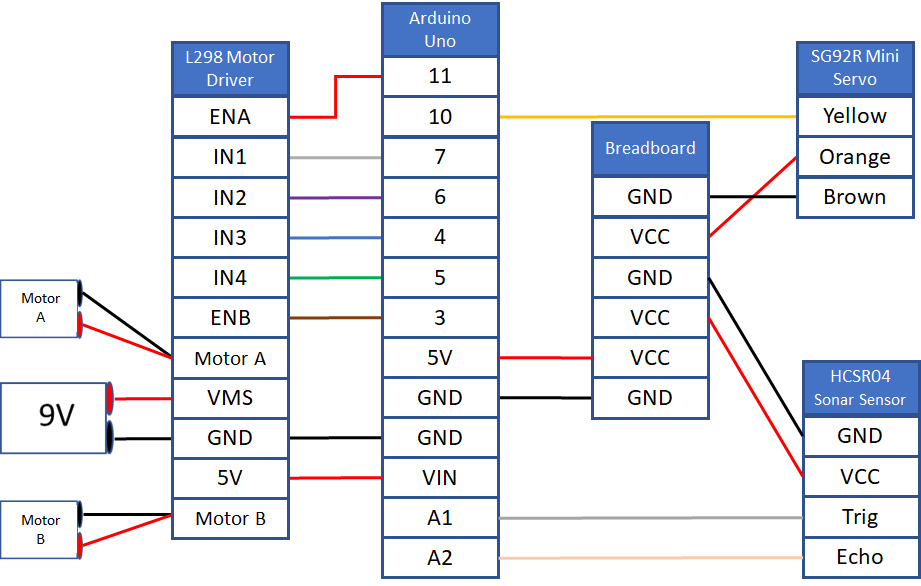
Gather all the components/parts and connect them by following the circuit diagram as shown below.
After watching so many YouTube tutorial videos on setting up this robot, I finally decided on this one because it has all the components that I currently have and that I can follow step by step, including the Arduino codes.
You can see the original codes for the obstacle avoiding robot on this link: Arduino Codes
When everything is connected, and I tried to test the robot, I realise it moves too fast that if I put the Pot with the orchid on top of it, it will fall over and create so much mess. So I need to modify and update the codes to slow down by adding the ENA and ENB to control the speed because it has the Pulse Width Modulation or PWM capability. PWM is a technique for getting analog results with digital means which works on Arduino Uno. Thank you for the help from Matthew and Mina.
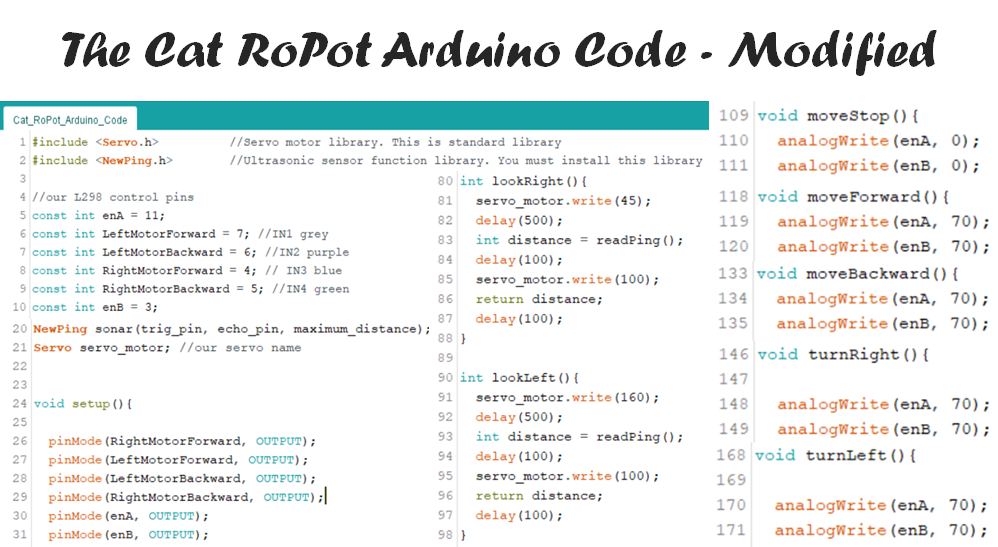
You can find the final codes that I used for this robot on this link: The Robot Codes
Overall, making this robot was a great experience and learning progress for my circuits and coding in Python skill using new devices that I’ve never used before, Arduino Uno, L298 Motor Driver and Sonar Sensor. I believe through these many failures and successes in troubleshooting making this Cyber-Physical System prototype (obstacle avoiding car robot) with sensors and actuators, I have progressed my level from Novice to Advance Beginner/Competent. I’m looking forward to more experiments in building CPS for the rest of this year.